Medizinische Assistenzsysteme

Nao
Nao ist ein humanoider Roboter von Softbank Robotics / Aldebaran Robotics. NAO ist 57,3 cm groß und wiegt 5,2 kg. Seine einzelnen Motoren in den Gelenken ermöglichen es ihm, sich wie ein Mensch zu bewegen. Außerdem verfügt er über 11 taktile Sensoren an Kopf, Händen und Füßen. Zusätzlich zur Kommunikation über den Lautsprecher und das Mikrofon leuchten die LEDs in seinen Augen in verschiedenen Farben auf.
Projekte
- Persönlicher Roboter-Coach
- Robotics for the Development of Cognition

© Universität Bielefeld Das RobotDoC (Robotics for Development of Cognition) Collegium ist ein multinationales Doktorandenausbildungsnetzwerk für die interdisziplinäre Ausbildung im Bereich der kognitiven Entwicklungsrobotik. Die RobotDoc Fellows entwickeln fortgeschrittene Expertise in der domänenspezifischen Robotik-Forschung und ergänzende übertragbare Fähigkeiten für Karrieren in der Wissenschaft und Industrie. Sie erwerben praktische Erfahrung durch Experimente mit verschiedenen humanoiden Roboterplattformen (z.B. iCub, Nao, Ecce, Asimo).
- Mindfulness and Exercise Training with Social Robots for Clinically Depressed Adolescents
- SoziRob
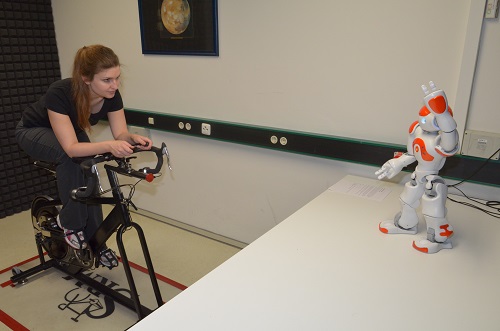
© Universität Bielefeld Ziel des SoziRob-Projekts ist die Entwicklung von intelligenten Robotern mit sozialen Interaktionsfähigkeiten, die Astronauten dabei unterstützen, die physischen und psychischen Belastungen von Langzeitmissionen in einem geschlossenen Habitat besser zu bewältigen. Dazu gehört die Entwicklung, Implementierung und Evaluation eines Motivationsmoduls zur qualitativen und quantitativen Verbesserung des Fitnesstrainings zur Vermeidung von Amyothrophie. Darüber hinaus sollen soziale Aktivitäten durch das Spielen von Spielpaaren mit dem Roboter Flobi angeregt werden.
- Joint Attention Training










.jpg)
{kind=link}