

Abgeschlossene Projekte
Die Persuasivität von Robotern in Bezug auf die Akzeptanz von Gesundheitsvorschriften

Angesichts der Corona-Pandemie könnten soziale Roboter an öffentlichen Plätzen ein nützliches Instrument sein, um die Menschen anzuleiten und daran zu erinnern, sich an die allgemeinen Regeln zu halten (z. B. Tragen einer Maske, Wahrung der sozialen Distanz). Darüber hinaus könnten Roboter ein nützliches Hilfsmittel für Ordnungsämter darstellen, um beispielsweise die Ansteckungsgefahr für Mitarbeiter zu verringern. Es ist jedoch ungewiss, ob und wie Roboter die Einhaltung von Vorschriften verbessern könnten.
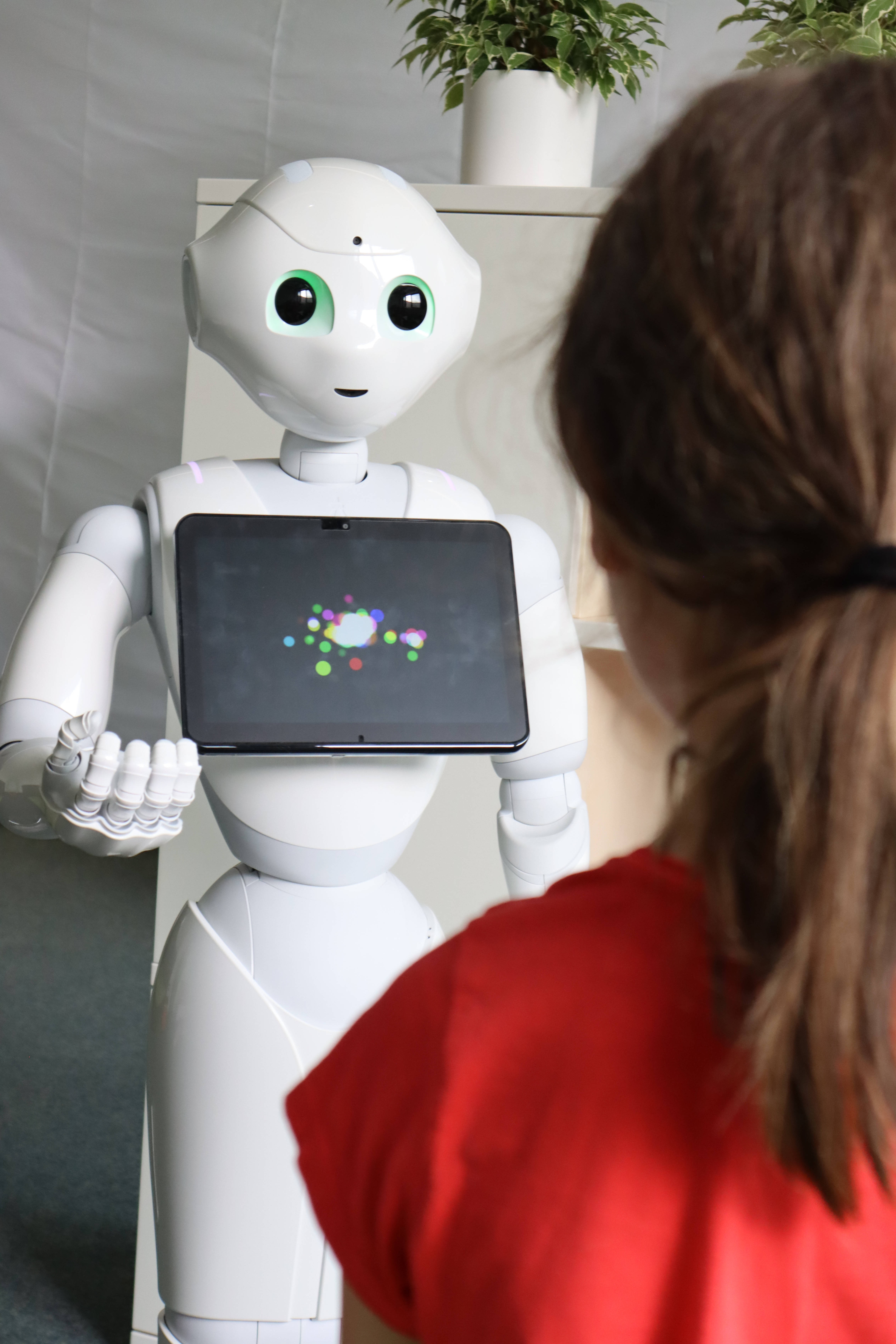
Aus diesem Grund wurde in diesem studentischen Projekt eine 2 (Ablenkung: ja/nein) mal 2 (Argument: stark/schwach) gemischte HRI-Videostudie durchgeführt, in der die Überzeugungskraft der Argumente eines Roboters auf der Grundlage des Elaboration Likelihood Model of persuasion (ELM) untersucht wurde. Die Teilnehmer sahen ein Video, in dem der Roboter Pepper Menschen mit einer starken oder schwachen Argumentation zum Tragen einer Maske überredete. Als Ablenkung mussten die Teilnehmer entweder die Vorkommen des Wortes Maske im Video zählen oder nicht.
Unsere Ergebnisse zeigen, dass die Ablenkung keinen Einfluss hatte, während die Stärke des Arguments die wahrgenommene Überzeugungskraft des Roboters signifikant beeinflusst.
weitere Informationen
SoziRob

Ziel des SoziRob-Projekts ist die Entwicklung von intelligenten Robotern mit sozialen Interaktionsfähigkeiten, die Astronauten dabei unterstützen, die physischen und psychischen Belastungen von Langzeitmissionen in einem geschlossenen Habitat besser zu bewältigen. Dazu gehört die Entwicklung, Implementierung und Evaluation eines Motivationsmoduls zur qualitativen und quantitativen Verbesserung des Fitnesstrainings zur Vermeidung von Amyothrophie. Darüber hinaus sollen soziale Aktivitäten durch das Spielen von Spielpaaren mit dem Roboter Flobi angeregt werden.
Bei Langzeitmissionen im Weltraum sind körperliche Übungen von entscheidender Bedeutung, um die körperliche Verfassung des Menschen bis zur Rückkehr zur Erde zu erhalten. Außerdem können Übungen bei der Stressbewältigung helfen, kognitive Vorteile bieten und negative Moralvorstellungen verhindern. Das Training im Weltraum ist jedoch schwieriger. Das Training wird oft nicht abgelenkt, und es fehlt ein Trainingspartner. Darüber hinaus wirkt sich die Umgebung im Weltraum auf die körperliche Verfassung aus.
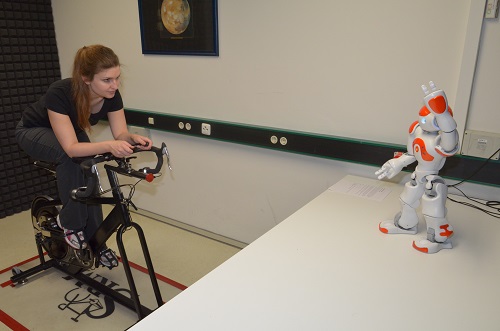
In Zusammenarbeit mit dem Deutschen Zentrum für Luft- und Raumfahrt wurde das Projekt SoziRob initiiert. Ziel des Projektes war es, den Nutzen von Robotersystemen für Raumfahrtmissionen als assistierende Partner zu untersuchen. Für eine Langzeit-Isolationsstudie wurden zwei Interaktionsszenarien entworfen und umgesetzt. Das erste Szenario konzentrierte sich auf körperliche Übungen. Der Roboter Nao fungiert als Trainingscoach, der den Menschen bei Sportübungen unterstützt und durch Indoor-Radsport-Sessions führt. Während jeder Sitzung kündigt Nao die vom Teilnehmer auszuführenden Übungen an und unterstützt jede Übung mit Körperbewegungen.
Das zweite Szenario konzentrierte sich auf die soziale Interaktion zwischen einem Menschen und einem Roboter. Der Roboterkopf Flobi sorgt für eine unterhaltsame Interaktion, indem er das Spiel der Paare spielt. Die Interaktion sollte die Teilnehmer aufmuntern und Stress abbauen. Darüber hinaus bietet diese Art von Spiel eine kognitive Herausforderung und somit einen mentalen Nutzen. Wir haben unsere Szenarien und unser System während einer dreiwöchigen Isolationsstudie im Deutschen Zentrum für Luft- und Raumfahrt in Köln evaluiert.