© Universität Bielefeld


CINEMENTAS - Mentale Modelle für die Interaktion mit sozialen Robotern
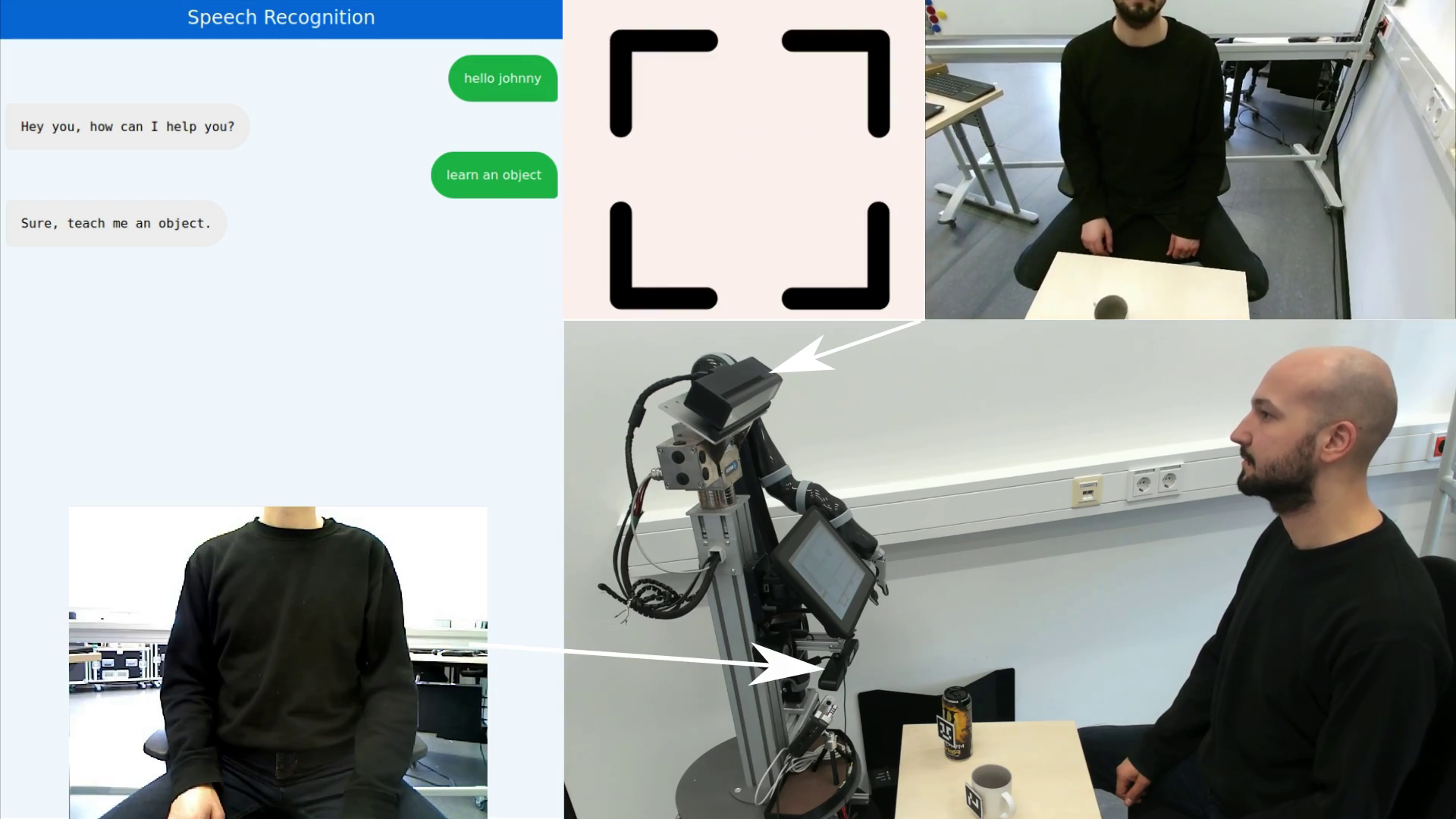
Technologien, die menschliches Verhalten imitieren, werden heutzutage zwar häufig eingesetzt, um die Zufriedenheit und Akzeptanz von Robotern zu erhöhen, jedoch schaden sie den unerfahrenen Nutzern in ihrer Fähigkeit, das Potential eines Roboters richtig zu antizipieren, d. h. sie erzeugen ein fehlerhaftes mentales Modell der Fähigkeiten des Roboters. In diesem Projekt entwickeln wir neuartige Methoden, die es den Nutzern ermöglichen, (1) das Verhalten des Roboters in Abhängigkeit von seinem Kontext und seinen Bedürfnissen zu konfigurieren, indem wir ihnen (2) verständliche und transparente Informationen über die Roboterarchitektur bereitstellen, die sich auf beobachtbare und vertraute Konzepte stützen.
