Interaktive Robotik in Medizin und Pflege

© Universität Bielefeld












Reduzierung der Diskrepanz in mentalen Modellen bei kooperativem Lernen mit Robotern
Durch die steigende Relevanz von maschinellem Lernen und künstlicher Intelligenz im Alltag ist es wichtig, die Vorteile auch für unerfahrene Nutzern zugänglich zu machen. Besonders interessant sind hierbei intelligente Roboter, die von unerfahrenen Nutzern trainiert und unterrichtet werden sollen, um spezifische Aufgaben zu erfüllen und Menschen bei ihren Aktivitäten zu unterstützen. Ebenso finden intelligente Assistenzsysteme Anwendung im Bereich des Autofahrens und in der Medizin, in denen sie sich flexibel an die individuellen Bedürfnisse und Wünsche der Nutzern anpassen sollen.
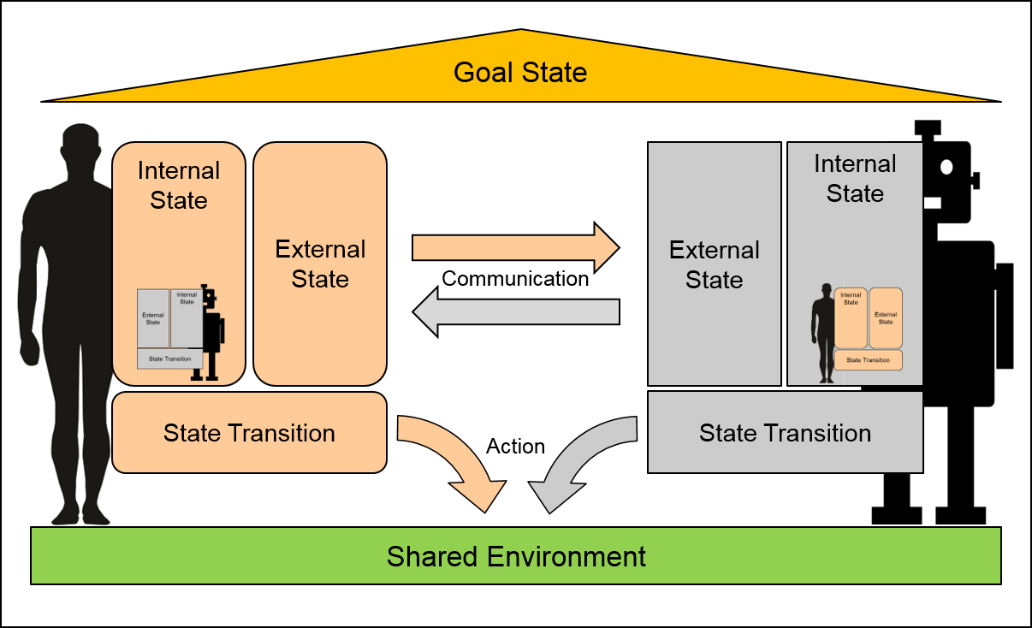
Allerdings bestehen Herausforderungen in Bezug auf die komplexe und schwer verständliche Natur solcher Systeme. Die Vision der kooperativen Intelligenz verlangt ein gegenseitiges Verständnis zwischen Menschen und KI-Systemen, um eine effektive Zusammenarbeit zu ermöglichen und gemeinsame Ziele zu erreichen. Dieses Projekt konzentriert sich dabei auf die Rolle der mentalen Modelle in der Mensch-Roboter-Interaktion. Menschliche mentale Modelle stellen eine Schlüsselkomponente für das Verständnis von Robotern dar. Die ‘Theory of Mind’ zeigt, dass die effiziente Zusammenarbeit zwischen Mensch und Roboter stark von einer geringen Diskrepanz in den mentalen Modellen profitiert. Daher beschäftigt sich dieses Projekt damit, die Vorstellungen über die Fähigkeiten von Robotern bei Menschen besser zu verstehen. Dafür werden verschiedene Feedback- und Transparenz-Mechanismen genutzt, um die Diskrepanz des mentalen Modells des Roboters beim Menschen erst quantifizierbar zu machen und danach zu verringern. Dieses Projekt wird in Kooperation mit dem Honda Research Institute realisiert, um langfristig zur Verbesserung der Mensch-Roboter-Interaktion bei zu tragen und eine Brücke zwischen Menschen und Maschinen zu schaffen.