Interaktive Robotik in Medizin und Pflege

© Universität Bielefeld












B05 - Erklärbarkeit ko-konstruieren mit einem interaktiv lernenden Roboter
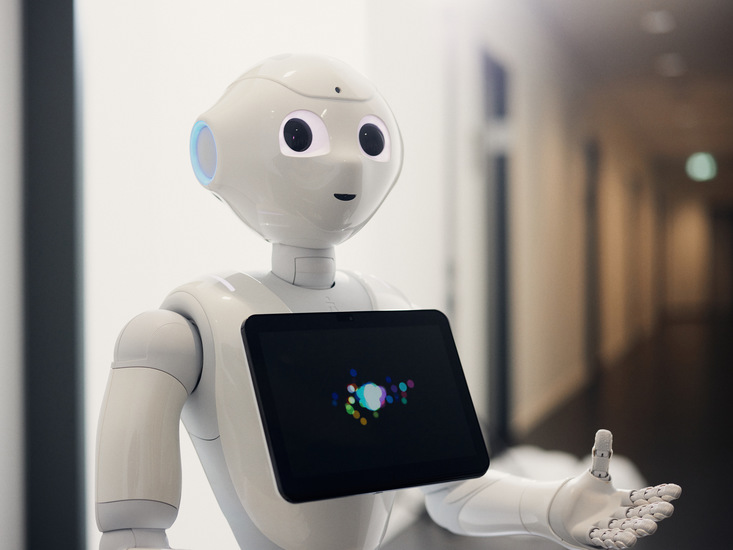
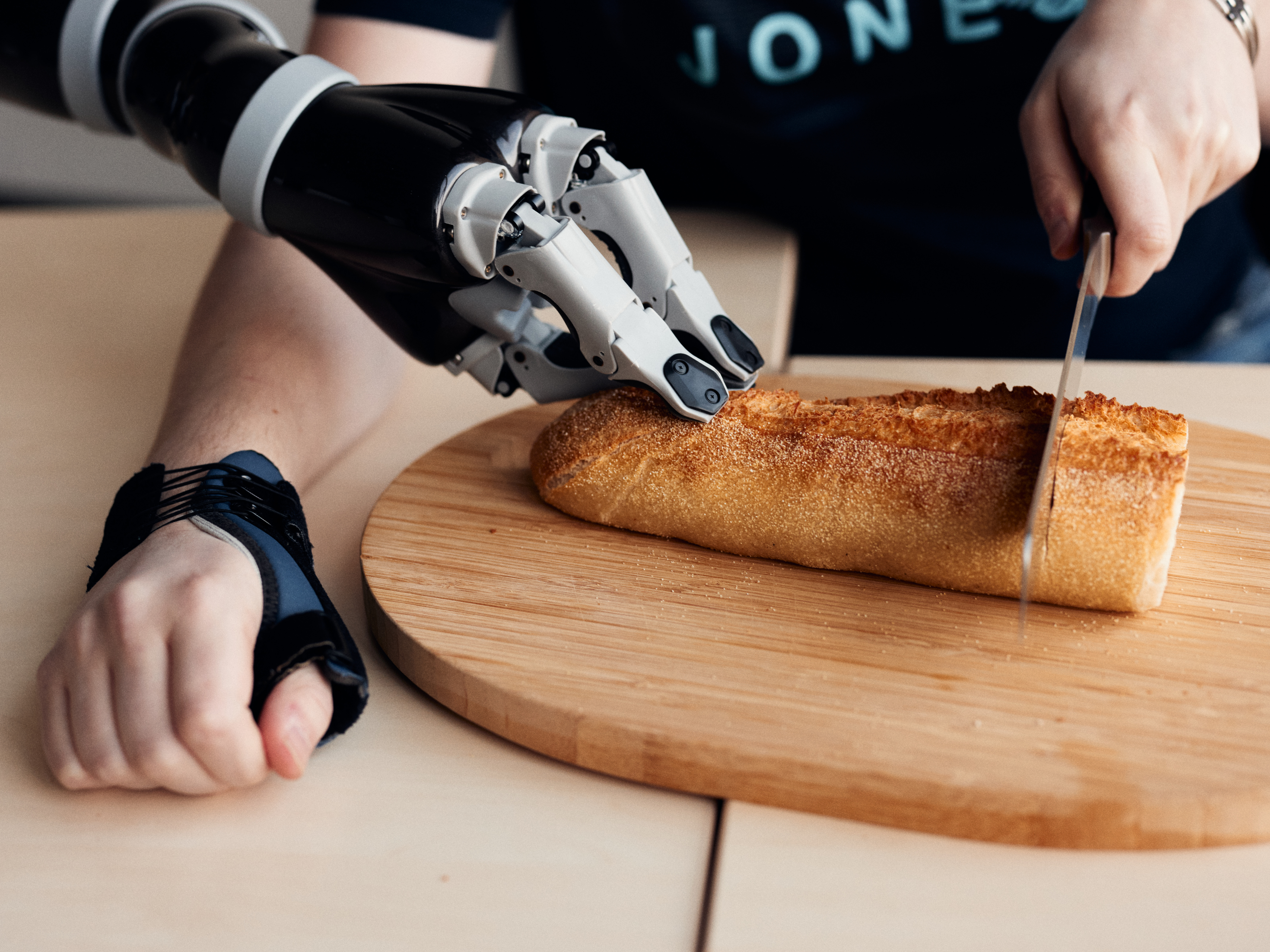
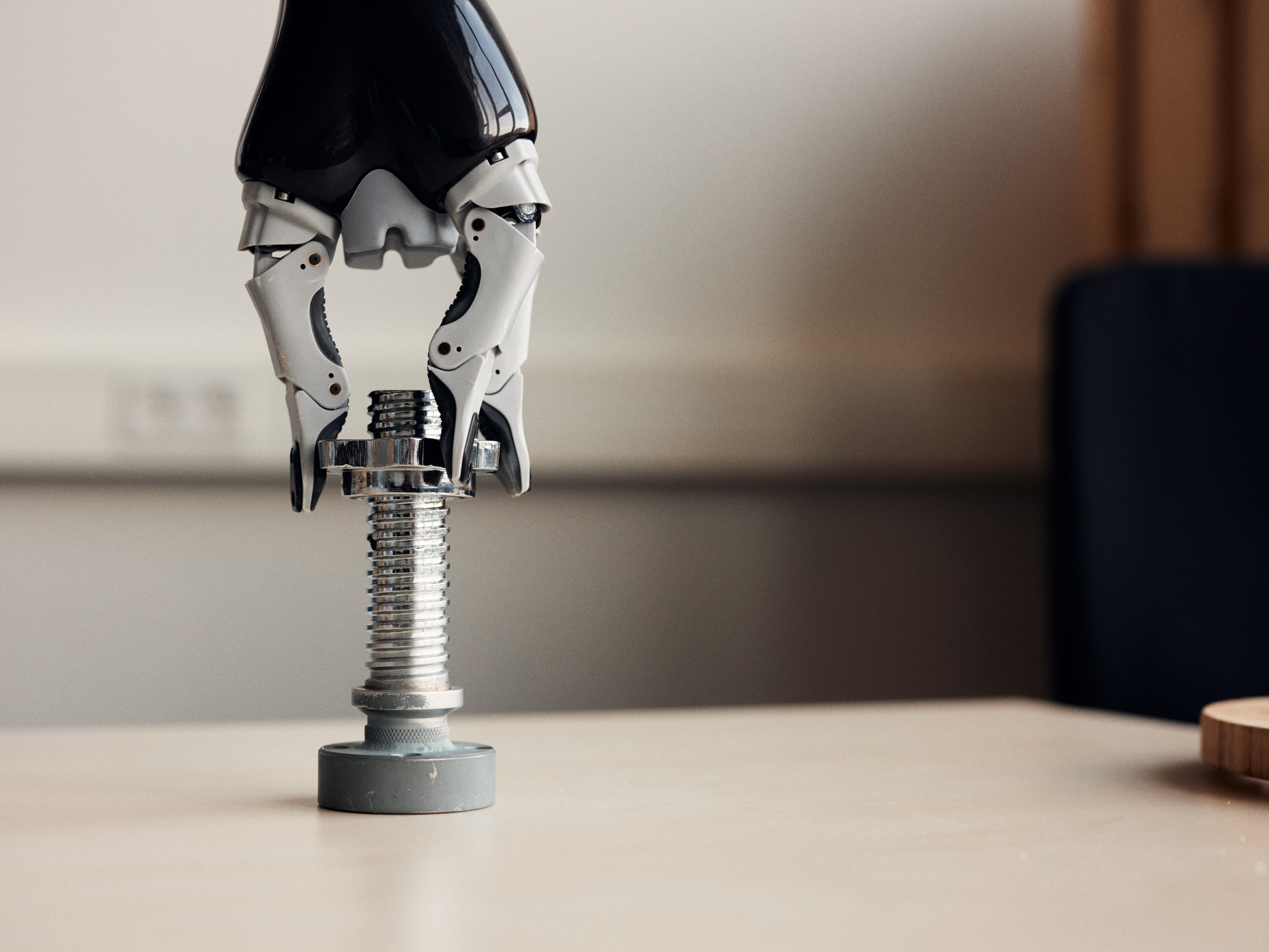
Das übergeordnete Ziel von B05 ist es, eine kontextsensitive Erklärbarkeit beim interaktiven Lernen von Aufgaben zu erreichen - eine Erklärbarkeit, die vor allem implizit sein sollte und keine ausgeprägten Erklärungen beinhaltet. Das Projekt betrachtet das Szenario eines KI-Systems in Form eines humanoiden Roboters, der mit einem hochmodernen Lernmechanismus ausgestattet ist. Zudem erlernt er physische Aufgaben in der Interaktion mit menschlichen Benutzer*innen ohne tieferes technisches Wissen. Dieses Szenario ist in verschiedenen Bereichen von großer Bedeutung, da Roboter als allgegenwärtige Haushaltshelfer*innen, medizinische Assistierenden oder Assistierenden in Fabrikhallen in unseren Alltag einziehen. Daher müssen wir sie in die Lage versetzen, von den Benutzern*innen im Alltag zu lernen.
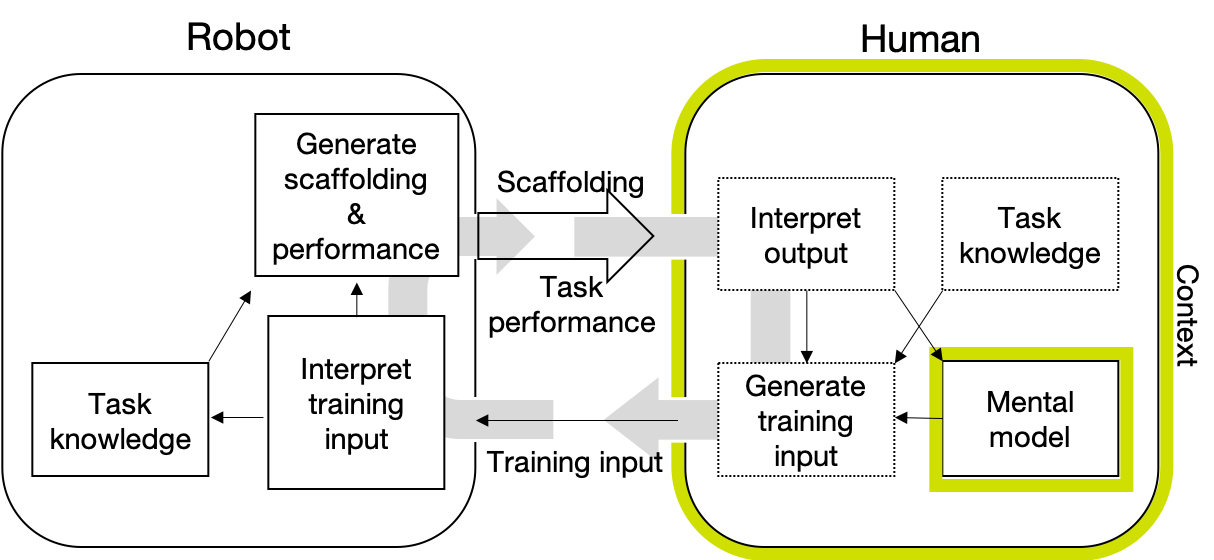
Damit ein solches interaktives Lernen erfolgreich sein kann, muss der*/die menschliche Benutzer*in in der Lage sein, ein genaues mentales Modell (d. h. interne Repräsentationen, die Menschen über Dinge aufbauen) zu bilden, wie das System lernt. Nur dann kann der*/die Benutzer*in den Roboter verstehen und einen guten Trainingsinput für das Lernen liefern. Gleichzeitig sollte eine Erklärung des Lernens (unser Explanandum) durch den Roboter (unser Explainer) für den*die menschliche/n Nutzer*in (unser Explainee) die Interaktion nicht dominieren, sondern nebenher passieren.
B05 geht über die derzeitigen Human-in-the-Loop-Systeme hinaus und strebt das an, was wir als co-konstruktives Training (CCT) bezeichnen. Das Verständnis des*der Benutzer*in, wie der Roboter lernt, wird durch die Kombination von zwei Mechanismen ko-konstruiert: (a) Überwachung des mentalen Modells des*der Benutzer*in anhand der Trainingsdaten und (b) adaptive Unterstützung des Verständnisses des*der Benutzer*in durch Visualisierung interner (Architektur-)Informationen. Das langfristige Ziel von B05 ist die algorithmische Modellierung des Kontextes einer Trainingsinteraktion in einem System, das in der Lage ist, ein ko-konstruktives Training auf den einzelnen menschlichen Nutzer zuzuschneiden. In der ersten Phase wird sich das Projekt mit der Schaffung der empirischen und konzeptionellen Grundlage durch eine Reihe von experimentellen Mensch-Roboter-Interaktionsstudien befassen. B05 hat zwei Hauptforschungsschwerpunkte, die in Zusammenarbeit mit dem Projekt Ö verfolgt werden. Der erste Schwerpunkt untersucht im Hinblick auf den ko-konstruktiven Ansatz die Interaktionen, die beim Training eines lernenden Roboters stattfinden. Demzufolge kann Erklärbarkeit innerhalb einer ko-konstruktiven Interaktion erreicht werden, und B05 testet, ob ein akkurates mentales Modell, das der*die Benutzer*in vom Lernprozess des KI-Systems hat, in einem CCT entstehen kann. Im zweiten Hauptforschungsschwerpunkt wird das Projekt für sein langfristiges Ziel, ein kontextsensitives System zu entwickeln, die soziale Kontextualisierung dieses Trainings untersuchen, um zu verstehen, ob sich die benötigten Technologiekonzepte für Menschen mit unterschiedlichen Rollen in der Gesellschaft unterscheiden. Konkret wird das Projekt zunächst die Faktoren wie Geschlecht und Alter sowie das Vorwissen berücksichtigen und versuchen, deren Einfluss auf die Bildung der mentalen Modelle der Nutzer sowie dessen Einstellung zur Technologie im CCT-Umfeld zu verstehen.